具有蛇形结构的电缆沟状态巡检机器人
2019年06月04日 20:41
所属学院: [] 点击:
湖南省大学生研究性学习和创新性实验计划
项 目 申 报 表
项目名称:
如果您无法在线浏览此 PDF 文件,则可以 下载免费小巧的 福昕(Foxit) PDF 阅读器,安装后即可在线浏览 或 下载免费的 Adobe Reader PDF 阅读器,安装后即可在线浏览 或 下载此 PDF 文件
|
学校名称
|
新利luck在线·(中国)有限公司官网
|
学生姓名
|
学 号
|
专 业
|
性 别
|
入 学 年 份
|
廖子涵
|
201524050418
|
电气工程及其自动化
|
男
|
2015
|
臧文龙
|
201524050110
|
电气工程及其自动化
|
男
|
2015
|
谢超
|
201524050117
|
电气工程及其自动化
|
男
|
2015
|
彭禹尧
|
201524050624
|
电气工程及其自动化
|
男
|
2015
|
严一帆
|
201530010218
|
电气工程及其自动化
|
男
|
2015
|
指导教师
|
王旭红
|
职称
|
教授
|
项目所属
一级学科
|
电气工程
|
项目科类(理科/文科)
|
理科
|
学生曾经参与科研的情况
廖子涵:
(1) 2016年9月 创新实验实验室
(2) 2016年5月 电工杯数模竞赛
(3) 2016年9月 国家计算机二级考试
臧文龙:
(1) 2016年5月 电工杯数模竞赛
(2) 2016年9月 国家计算机二级考试
谢超:
(1) 2016年9月 国家计算机二级考试
|
指导教师承担科研课题情况
湖南省科技计划项目:2015GK3018电力系统GIS故障诊断方法研究及诊断系统研制
|
项目研究和实验的目的、内容和要解决的主要问题
研究目的
研制一种具有蛇形结构的状态巡检机器人,该机器人具备以下功能:
(1) 可以在狭小、复杂的电缆沟内自主行走、攀爬越障
(2) 实现对电缆沟的实际运行状态和运行环境的全面监测
(3) 通过智能化联动控制机制,实现潜在隐患和警情的及时处理
研究内容
(1) 蛇形机器人的总体结构设计,如图1
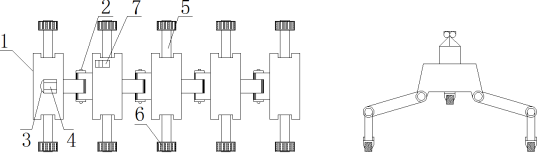
1.机器人躯体 2.躯体转向关节 3.云台 4.视频监测装置 5.机器人行走臂6. 行走轮7.传感器
图1蛇形巡检机器人结构
(2) 蛇形机器人的运动建模与协调控制方法,如图2
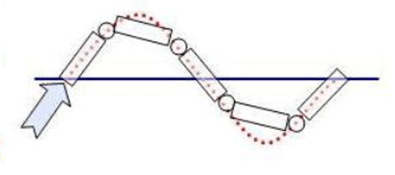
图2 蛇形机器人的运动示意图
(3)具有视、听、嗅功能的机器人综合感知系统,如图3,4,5,6

图3基于红外成像技术的电缆温度检测流程
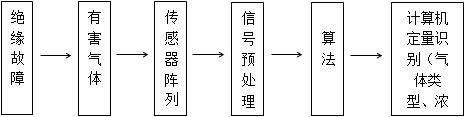
图4基于电子鼻的绝缘故障检测流程

图5积水检测流程
(4)机器人的视觉导航与定位
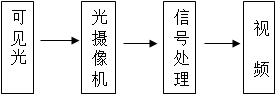
图6光学成像过程
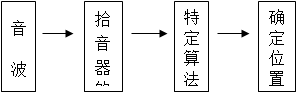
图7噪音收集流程
(5)电缆沟运行状态的智能评估方法
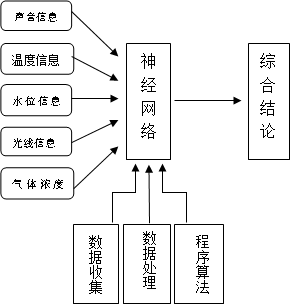
图8智能评估系统
主要问题
(1)电缆沟状态监测的不足
(2)电缆沟内地形狭小复杂,机器人难以运作
(3)电缆沟内的检修维护工作难度大时间长
|
国内外研究现状和发展动态:
北京电力局在2007年开发了电力电缆接头温度远程在线监测网络系统,综合采用计算机技术和数据通信技术,具备了在线监测电缆接头的温度变化的功能,能够在电缆发生燃爆前进行预测,以确保电缆运行安全。然而,该系统检测点单一,只能监测温度。2011年,上海交通大学与上海东云信息技术发展有限公司共同开发了“电力电缆隧道计算机综合监控系统”,该系统用于监测电缆隧道中的电缆输送量,温度,气体和湿度等等,也提出了火灾的自动预防与处理,但是,它却不具备智能性分析数据,智能评估隧道状况的功能。2014年,山东聊城供电公司开发了输电电缆综合在线监测预警系统,实现了电缆沟内的环境以及电缆运行状态的在线实时监测。
在电缆状态监测领域,国外较早开展研究,2004年美国东部电力公司推出了名为“PCJMS(Power Cable Junction Monitoring System)”的电缆在线监测系统。提出了一种在线评估接头电阻和绝缘老化的算法,通过电缆接头的温度变化来监测电缆的运行故障,但该系统功能较为单一,综合性差,无法对电缆环境中的湿度,气体,水位等其他因素进行综合的监测。2008年,日本仙台电力公司推出了电网故障综合评估系统,具备电缆线路状况综合评估功能。该系统综合性非常强,却没有提出如何自动排除险情的解决方案。2013年,美国Alfredo Vaccaro等人提出了一个智能电网的集成框架,简称Integrated Framework for Smart Microgrids,该框架把对电缆沟的在线监测与对设备的控制集合在一起,从而达到状态数据联动控制设备的效果。该思路可行,但未有具体的应用报道。
总之,目前对电缆沟状态监测的报道,大多集中于采用固定监测设备对电缆沟井中某一参数或几个参数进行测量,电缆沟长度大,采用固定式布点监测存在监测盲区,不能有效反映电缆的运行状态,而且,缺少数据分析,没有真正在集控中心再现电缆沟的实际运行情况,更没有与排水、灭火、通风、视频监视等系统进行联动控制,实现电缆沟内潜在隐患和警情的及时处理与排除,其应用效果受到很大限制。
目前,国内外正采用机器人开展架空输电线路和变电站巡检,而将机器人应用于电缆沟状态监测则缺少报道,电缆沟存在空间小、环境差、障碍多等特点,常规的轮式、履带式机器人难以正常工作,若能研制一种具有蛇形结构的灵巧智能巡检机器人,弥补上述监测方法的不足,将具有很好的应用前景。
|
本项目学生有关的研究积累和已取得的成绩
1、 已查阅了相关资料,明确了工作过程
2、 将工作原理制成图表便于理清思路
3、 学习了单片机和传感器的相关知识如电子鼻的工作过程
4、 学习了电机及其控制的相关知识
|
项目的创新点和特色
1、 在电缆沟的复杂环境下,研究基于视觉的电缆沟行走路线识别、障碍物检测与导航避障控制,解决巡检机器人的导航、定位问题。
2、 创建具有视、听、嗅功能的机器人综合感知系统。
3、 对电缆沟运行状态的智能评估
|
项目的技术路线及预期成果
1、技术路线
(1) 蛇形机器人的总体结构设计
研究具有多节躯体、躯体安装履带式行走轮、各节躯体通过两自由度转向关节连接的蛇形机器人综合构型,通过对躯体行走电机、关节转向电机的控制,可实现机器人在电缆沟内水平爬行、直角拐弯、竖立攀爬越障和全方位的电缆检测。
分析机器人的受力情况,以受力均衡为准则,研究红外和可见光视频检测装置、各类传感器、无线数据传输装置、蓄电池等在机器人上的布置。
蛇形巡检机器人的总体结构如图1所示: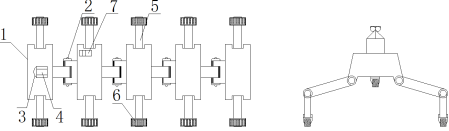
图9蛇形巡检机器人的总体结构
1.机器人躯体 2.躯体转向关节 3.云台 4.视频监测装置 5.机器人行走臂6. 行走轮7.传感器
(2) 蛇形机器人的运动控制
根据电缆沟的地形、地貌,研究蛇形机器人各躯体行走轮电机、关节转向电机的整体协调控制方法,实现机器人的精准运动控制。
(3) 建立具有视、听、嗅功能的机器人综合感知系统
根据电缆运行特性,建立具有视、听、嗅功能的机器人综合感知系统,其中视觉感知采用热成像和可见光成像相结合;听觉感知采用拾音器用于测量电缆设备噪声,通过基于声源的定位方法,计算息采集的延迟和几何关系以判断声源位置、强度和方向;嗅觉检测电缆运行所发出的异味,采用具有嗅觉功能的电子鼻结构,对电缆异味形成连续不断的检测。基于以上多传感器信息融合的综合感知系统,可对电缆状态进行全方位的快速感知和识别。
(4)机器人的视觉导航与定位
在电缆沟的复杂环境下,灵活、精确的机器人导航与自定位是一大难题,为此本项目将开展基于视觉的电缆沟行走路线识别、障碍物检测与导航避障控制的研究,力图解决巡检机器人的导航、定位问题。
(5)电缆沟运行状态的智能评估方法
根据获取的电缆沟状态数据,研究基于多传感器信息融合方法,建立智能化的数据分析系统,对电缆沟道内整条电缆温度的分布与变化、电缆绝缘情况、报警类型与报警等级,有无非法入侵、电缆设备外观有无异常等电缆运行状态做出有效的评估。
2、预期成果
(1)制做1台电缆沟巡检机器人;
(2)撰写项目研究技术报告:包括蛇形机器人的运动模模型及其控制方法;蛇形机器人的视、听、嗅功能综合感知系统;蛇形机器人的智能评估;
|
年度目标和工作内容(分年度写)
2017年2月—2017年5月 :深入学习国内外研究现状和发展动态,结合当前实际做出设想,制定工作目标计划,完善构思,充分做好前期准备工作。
2017月6月—2017年8月:重点学习蛇形机器人的运动模模型及其控制方法,结合电缆沟中的实际情况,进行技术难点突破。
2017年9月—2017年12月:重点设计蛇形机器人的视、听、嗅功能综合感知系统,使用各类知觉的相应技术,对蛇形机器人的“感知神经中枢”进行设计制作。
2018年1月—2018年2月:重点制成蛇形机器人的智能评估系统,将从电缆沟中获取的状态数据进行处理和有效评估。
2018年3月—2018年4月:总结项目成果,撰写研究报告。
|
指导教师意见
签字: 日期:
|